Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Схема управления коллекторным двигателем постоянного тока
Простую схему управления двигателем постоянного тока можно собирать из полевого транзистора. Он играет роль электронного ключа, который переключает схему питания двигателя после подачи напряжения на базу. Электронный ключ остается открытым на время, соответствующее длительности импульса.
ШИМ сигнал характеризуют коэффициентом заполнения, который равен обратной величие скважности. Коэффициент заполнения равен отношению продолжительности импульса к периоду его подачи
Скорость движения вала двигателя будет пропорциональна значению коэффициента заполнения. Поэтому, если частота ШИМ сигнала слишком низкая для обеспечения стабильной работы, то вал двигателя будет вращаться заметными рывками. Чтобы гарантировать плавное регулирование и стабильную работу частота должна превышать сотни герц.
Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения.
Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения . При увеличении rрегчастота вращения растет. Зависимость частоты вращения от тока возбуждения выражается
регулировочной характеристикой
двигателя n=f(IВ) при и .
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф
частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение
Ф
ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке ток якоря достигает значения ,т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрег необходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения. Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б
)
.
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф
меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)Iа, а поэтому потери в регулировочном реостате невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф
, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока
Ф
усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Принцип работы и число оборотов асинхронных двигателей
Данный вопрос рассмотрим на примере АДКР, как наиболее распространенного типа электродвигателей подъемно-транспортном и обрабатывающем оборудовании. Напряжение от сети подается на обмотку статора, каждая из трех фаз которой смещена геометрически на 120°. После подачи напряжения возникает магнитное поле, создающее путем индукции ЭДС и ток в обмотках ротора. Последнее вызывает электромагнитные силы, заставляющие ротор вращаться. Еще одна причина, по которой все это происходит, а именно, возникает ЭДС, является разность оборотов статора и ротора.
Одной из ключевых характеристик любого АДКР является частота вращения, расчет которой можно вести по следующей зависимости:
n = 60f / p, об/мин
где f – частота сетевого напряжения, Гц, р – число полюсных пар статора.
Все технические характеристики указываются на металлической табличке, закрепленной на корпусе. Но если она отсутствует по какой-то причине, то определить число оборотов нужно вручную по косвенным показателям. Как правило, используется три основных метода:
- Расчет количества катушек. Полученное значение сопоставляется с действующими нормами для напряжения 220 и 380В (см. табл. ниже),
- Расчет оборотов с учетом диаметрального шага обмотки. Для определения используется формула вида:
2p = Z1 / y,
где 2p – число полюсов, Z1 – количество пазов в сердечнике статора, y – собственно, шаг укладки обмотки.
Стандартные значения оборотов:
- Расчет числа полюсов по сердечнику статора. Используются математические формулы, где учитываются геометрические параметры изделия:
2p = 0,35Z1b / h или 2p = 0,5Di / h,
где 2p – число полюсов, Z1 – количество пазов в статоре, b – ширина зубца, см, h – высота спинки, см, Di – внутренний диаметр, образованный зубцами сердечника, см.
После этого по полученным данным и магнитной индукции нужно определить количество витков, которое сверяется с паспортными данными двигателей.
Реализация ШИМ
Многие модели современных ПЛК контроллеров предоставляют возможность организации ШИМ. Но иногда доступных каналов оказывается недостаточно и приходится использовать программу обработки прерывай.
Алгоритм реализации ШИМ:
- В начале каждого импульса ставим единицу и ждем повышения значения до заданного уровня.
- Сбрасываем линию на ноль.
Советуем изучить — Организация эксплуатации электрических распределительных сетей
Длительность импульса легче отследить с определенной периодичностью или ступенями. Например, десять регулировочных ступеней соответствуют 10% от максимального значения. Прежде всего необходимо определиться с частотой импульсов и количеств ступеней регулирования. Далее, умножают полученные значения. Результат произведения даст необходимую частоту прерываний таймера.
При желании можно выбрать подходящую частоту таймера или количество ступеней регулирования и путем расчетов находят необходимую частоту импульсов.
Так же по теме регулирования скорости коллекторного двигателя предлагаем статью «Управление коллекторным двигателем постоянного тока методом ШИМ»
Что такое частотный преобразователь
Основной функцией частотных преобразователей является плавная регулировка скорости вращения асинхронных двигателей. С этой целью на выходе устройства создается трехфазное напряжение с переменной частотой.
Преобразователи частоты нередко называются инверторами. Их основной принцип действия заключается в выпрямлении переменного напряжения промышленной сети. Для этого применяются выпрямительные диоды, объединенные в общий блок. Фильтрация тока осуществляется конденсаторами с высокой емкостью, которые снижают до минимума пульсации поступающего напряжения. В этом и заключается ответ на вопрос для чего нужен частотный преобразователь.
В некоторых случаях в схему может быть включена так называемая цепь слива энергии, состоящая из транзистора и резистора с большой мощностью рассеивания. Данная схема применяется в режиме торможения, чтобы погасить напряжение, генерируемое электродвигателем. Таким образом, предотвращается перезарядка конденсаторов и преждевременный выход их из строя. В результате использования частотников, асинхронные двигатели успешно заменяют электроприводы постоянного тока, имеющие серьезные недостатки. Несмотря на простоту регулировки, они считаются ненадежными и дорогими в эксплуатации. В процессе работы постоянно искрят щетки, а электроэрозия приводит к износу коллектора. Двигатели постоянного тока совершенно не подходят для взрывоопасной и запыленной среды.
В отличие от них, асинхронные двигатели значительно проще по своему устройству и надежнее, благодаря отсутствию подвижных контактов. Они более компактные и дешевые в эксплуатации. К основному недостатку можно отнести сложную регулировку скорости вращения традиционными способами. Для этого было необходимо изменять питающее напряжение и вводить дополнительные сопротивления в цепь обмоток. Кроме того, применялись и другие способы, которые на практике оказывались неэкономичными и не обеспечивали качественной регулировки скорости. Но, после того как появился преобразователь частоты для асинхронного двигателя, позволяющий плавно регулировать скорость в широком диапазоне, все проблемы разрешились.
КПД
Изготовление своими руками
Если нет возможности, а также желания приобретать регулятор заводского типа, то можно собрать его своими руками. Хотя регуляторы типа » tda1085 » зарекомендовали себя очень хорошо. Для этого нужно детально ознакомиться с теорией и приступить к практике. Очень популярны схемы симисторного исполнения, в частности регулятор оборотов асинхронного двигателя 220в (схема 5). Сделать его несложно. Он собирается на симисторе ВТ138, хорошо подходящем для этих целей.
Схема 5 — Простой регулятор оборотов на симисторе.
Этот регулятор может быть использован и для регулировки оборотов двигателя постоянного тока 12 вольт, так как является довольно простым и универсальным. Обороты регулируются благодаря изменению параметров Р1, определяющему фазу входящего сигнала, который открывает переход симистора.
Принцип работы прост. При запуске двигателя происходит его затормаживание, индуктивность изменятся в меньшую сторону и способствует увеличению U в цепи «R2—>P1—>C2». При разряде С2 симистор открывается в течение некоторого времени.
Существует еще одна схема. Она работает немного по-другому: путем обеспечения хода энергии обратного типа, которое является оптимально выгодным. В схему включен довольно мощный тиристор.
Схема 6 — Устройство тиристорного регулятора.
Схема состоит из генератора сигнала управления, усилителя, тиристора и участка цепи, выполняющего функции стабилизатора вращения ротора.
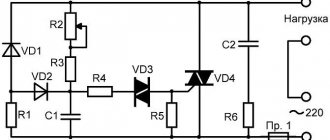
Наиболее универсальной схемой является регулятор на симисторе и динисторе (схема 7). Он способен плавно убавить скорость вращения вала, задать реверс двигателю (изменить направление вращения) и понизить пусковой ток.
Принцип работы схемы:
- С1 заряжается до U пробоя динистора D1 через R2.
- D1 при пробитии открывает переход симистора D2, который отвечает за управление нагрузкой.
Напряжение при нагрузке прямо пропорционально зависит от частотной составляющей при открытии D2, зависящего от R2. Схема применяется в пылесосах. Она содержит универсальное электронное управление, а также способность простого подключения питания 380 В. Все детали следует расположить на печатной плате, изготовленной по лазерно-утюжной технологии (ЛУТ). Подробно с этой технологии изготовления плат можно ознакомиться в интернете.
Таким образом, при выборе регулятора оборотов электродвигателя возможна покупка заводского или изготовление своими руками. Самодельный регулятор сделать достаточно просто, так как при понимании принципа действия устройства можно с легкостью собрать его. Кроме того, следует соблюдать правила безопасности при осуществлении монтажа деталей и при работе с электричеством.
Плавная работа двигателя, без рывков и скачков мощности – это залог его долговечности. Для контроля этих показателей используется регулятор оборотов электродвигателя на 220В, 12 В и 24 В, все эти частотники можно изготовить своими руками или купить уже готовый агрегат.
напряжением регулирование
Ещё совсем недавно (10 назад лет) частотных регуляторов скорости двигателей на было рынке ограниченное количество, и стоили они дорого довольно. Причина — не было дешёвых силовых транзисторов высоковольтных и модулей.
Но разработки в области твердотельной позволили электроники вывести на рынок силовые IGBT-Как. модули следствие — массовое появление на рынке кондиционеров инверторных, сварочных инверторов, преобразователей частоты.
На момент данный частотное преобразование — основной способ мощности регулирования, производительности, скорости всех устройств и приводом механизмов в которых является электродвигатель.
Однако, частоты преобразователи предназначены для управления трёхфазными Однофазные.
электродвигателями двигатели могут управляться:
- специализированными трёхфазными ПЧ
- однофазными ПЧ с исключением конденсатора
Преобразователи для двигателей однофазных
В настоящее время только один заявляет производитель о серийном выпуске специализированного ПЧ для двигателей конденсаторных — INVERTEK DRIVES.
Это модель Для E2
Optidrive стабильного запуска и работы двигателя специальные используются алгоритмы.
При этом регулировка возможна частоты и вверх, но в ограниченном диапазоне частот, мешает этому конденсатор установленный в цепи фазосдвигающей так, обмотки как его сопротивление напрямую частоты от зависит тока:
Xc=1/2?fC
f — частота тока
С — конденсатора ёмкость
В выходном каскаде используется мостовая четырьмя с схема выходными IGBT транзисторами:
Optidrive E2 управлять позволяет двигателем без исключения из схемы есть, то конденсатора без изменения конструкции двигателя — в моделях некоторых это сделать довольно сложно.
специализированного Преимущества частотного преобразователя:
- интеллектуальное управление стабильно
- двигателем устойчивая работа двигателя
- огромные современных возможности ПЧ:
- возможность управлять работой двигателя поддержания для определённых характеристик (давления воды, воздуха расхода, скорости при изменяющейся нагрузке)
- защиты многочисленные (двигателя и самого прибора)
- входы датчиков для (цифровые и аналоговые)
- различные выходы
- интерфейс коммуникационный (для управления, мониторинга)
- предустановленные ПИД
- скорости-регулятор
Минусы использования однофазного ПЧ:
- управление ограниченное частотой
- высокая стоимость
Использование ЧП трёхфазных для двигателей
Стандартный частотник имеет на трёхфазное выходе напряжение. При подключении к ему двигателя однофазного из него извлекают конденсатор и соединяют по ниже приведённой схеме:
Геометрическое расположение обмоток относительно друг друга в статоре асинхронного двигателя Фазовый 90°:
составляет сдвиг трёхфазного напряжения -120°, следствие как этого — магнитное поле будет не пульсирующее , а круговое и его уровень будет меньше при чем питании со сдвигом в 90°.
В некоторых конденсаторных дополнительная двигателях обмотка выполняется более тонким соответственно и проводом имеет более высокое сопротивление.
работе При без конденсатора это приведёт к:
- сильному более нагреву обмотки (срок службы возможны, сокращается кз и межвитковые замыкания)
- разному току в Многие
обмотках ПЧ имеют защиту от асимметрии токов в при, обмотках невозможности отключить эту функцию в работа приборе по данной схеме будет невозможна
более:
- Преимущества низкая стоимость по сравнению со специализированными ПЧ
- выбор огромный по мощности и производителям
- более широкий регулирования диапазон частоты
- все преимущества ПЧ (входы/интеллектуальные, выходы алгоритмы работы, коммуникационные интерфейсы)
метода Недостатки:
- необходимость предварительного подбора ПЧ и двигателя совместной для работы
- пульсирующий и пониженный момент
- нагрев повышенный
- отсутствие гарантии при выходе из трёхфазные, т.к. строя ПЧ не предназначены для работы с однофазными Источник
Советуем изучить — Линейные светодиодные лампы и их использование
Виды и критерии выбора
Для выбора регулятора нужно руководствоваться определенными характеристиками для конкретного случая. Среди всех критериев можно выбрать следующие:
- По типу управления. Для двигателей коллекторного типа применяются регуляторы с векторной или скалярной системой управления.
- Мощность является основным параметром, от которого нужно отталкиваться.
- По диапазону U.
- По диапазону частот. Нужно выбирать модель, которая соответствует требованиям пользователя для конкретного случая.
- Прочие характеристики, в которые включены гарантия, габариты, комплектация.
Кроме того, регулятор подбирается мощнее, чем сам электродвигатель по формуле: Pрег = 1,3 * Pдвиг (Pрег, Pдвиг — мощность регулятора и двигателя соответственно). Его нужно выбирать на разные диапазоны U, так как универсальность играет важную роль.
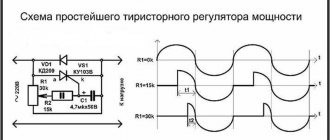
Устройство на тиристорах
В этой модели, представленной на схеме 1, применяются 2 тиристора, включенных встречно-параллельно, хотя их можно заменить одним симистором.
Схема 1 — Тиристорная регулировка оборотов коллекторного двигателя без потери мощности.
Эта схема производит регулирование с помощью открытия или закрытия тиристоров (симистора) при фазовом переходе через нейтраль. Для корректного управления коллекторным двигателем применяют следующие способы модификации схемы 1:
- Установка защитных LRC-цепей, состоящих из конденсаторов, резисторов и дросселей.
- Добавление на входе емкости.
- Использование тиристоров или симистора, ток которых превышает номинальное значение силы тока двигателя в диапазоне от 3..8 раз.
Этот тип регуляторов имеет достоинства и недостатки. К первым относятся низкая стоимость, маленький вес и габариты. Ко вторым следует отнести следующие:
- применение для моторов небольшой мощности;
- происходит шум и рывки мотора;
- при использовании схемы на симисторах происходит попадание постоянного U на двигатель.
Этот тип регулятора ставится в вентиляторы, кондиционеры, стиральные машины и электродрели . Отлично выполняет свои функции, несмотря на недостатки.
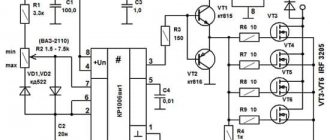
Транзисторный тип
Еще одним названием регулятора транзисторного типа является автотрансформатор или ШИМ-регулятор (схема 2). Он изменяет номинал U по принципу широтно-импульсной модуляции (ШИМ) при помощи выходного каскада, в котором применяются транзисторы типа IGBT.
Схема 2 — Транзисторный ШИМ-регулятор оборотов.
Коммутация транзисторов происходит с высокой частотой и благодаря этому можно изменить ширину импульсов. Следовательно, при этом изменится и значение U. Чем длиннее импульс и короче паузы, тем выше значение U и наоборот. Положительные аспекты применения этой разновидности следующие:
- Незначительный вес прибора при низких габаритах.
- Довольно низкая стоимость.
- При низких оборотах отсутствие шума.
- Управление за счет низких значений U (0..12 В).
Основной недостаток применения заключается в том, что расстояние до электромотора должно быть не более 4 метров.
Регулирование за счет частоты
Регулирование оборотов моторов различных типов за счет частоты получило широкое применение. Частотное преобразование занимает лидирующую позицию на рынке сбыта устройств-регуляторов оборотов и осуществления плавного пуска. Благодаря своей универсальности возможно влиять на мощность, производительность и скорость любого устройства с электродвигателем. Эти устройства применяются для однофазных и трехфазных двигателей. Применяются такие виды частотных преобразователей:
- Специализированные однофазные.
- Трехфазные без конденсатора.
Для регулирования оборотов используется конденсатор, включенный с обмотками однофазного двигателя (схема 3). Этот преобразователь частоты (ПЧ) имеет емкостное R, которое зависит от частоты протекающего переменного тока. Выходной каскад такого ПЧ выполнен на IGBT-транзисторах.
Схема 3 — Частотный регулятор оборотов.
У специализированного ПЧ есть свои преимущества и недостатки. Преимуществами являются следующие:
- Управление АД без участия человека.
- Стабильность.
- Дополнительные возможности.
Существует возможность управлять работой электромотора при определенных условиях, а также защита от перегрузок и токов КЗ. Кроме того, возможно расширять функционал при помощи подключения цифровых датчиков, мониторинга параметров работы и использования PID-регулятора. К минусам можно отнести ограничения при управлении частотой и довольно высокую стоимость.
Для трехфазных АД применяются также устройства регулирования частоты (схема 4). Регулятор имеет на выходе три фазы для подключения электромотора.
Схема 4 — ПЧ для трехфазного двигателя.
У этого варианта тоже есть свои сильные и слабые стороны. К первым можно отнести следующие: низкую стоимость, выбор мощности, широкий диапазон частотной регуляции, а также все преимущества однофазных преобразователей частоты. Среди всех отрицательных сторон можно выделить основные: предварительный подбор и нагрев при пуске.
Популярные модели регуляторов скорости для однофазного двигателя
Среди многообразия устройств, выполняющих функцию управления электродвигателем, существуют две основные разновидности моделей регуляторов оборотов. Это электронные тиристорные однофазные регуляторы скорости, которые работают за счет плавного изменения напряжения питания. Вторая разновидность моделей регуляторов оборотов – трансформаторный однофазный регулятор скорости. Его работа заключается в изменении положения трехступенчатого кулачкового переключателя, с помощью которого происходит изменение комбинации переключения обмоток.
Частотное управление регулированием скоростью асинхронного электродвигателя в наше время является техническим стандартом. Использование частотного регулятора вытеснило очень многие способы управления. Симметричное и несимметричное управление напряжением и использование добавочных сопротивлений, изменение числа пар полюсов ушли в прошлое.
Частотник, частотный преобразователь 220 — 380 регулятор оборотов электродвигателя
Watch this video on YouTube
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
U1=4,44w1k1fΦ
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
U1/f1=U’1/f’1
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.
Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.
В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
Недостатки:
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Частотный преобразователь: виды, принцип действия, схемы подключения
Частотный преобразователь разрешает своему владельцу снизить энергопотребление и автоматизировать процессы в управлении оборудованием и производством.
Основные компоненты частотного преобразователя: выпрямитель, конденсатор, IGBT-транзисторы, собранные в выходной каскад.
Благодаря способности управлением параметрами выходной частоты и напряжения достигается хороший энергосберегающий эффект. Энергосбережение выражается в следующем:
- В двигателе поддерживается неизменный текущий момент ращения вала. Это обусловлено взаимодействием выходной частоты инверторного преобразователя с частотой вращения двигателя и соответственно, зависимостью напряжения и крутящего момента на валу двигателя. Значит, что преобразователь дает возможность автоматически регулировать напряжение на выходе при обнаружении превышающего норму значения напряжения с определенной рабочей частотой нужно для поддержания требуемого момента. Все инверторные преобразователи с векторным управлением имеют функцию поддержания постоянного вращающего момента на валу.
- Частотный преобразователь служит для регулировки действия насосных агрегатов (см. страницу). При получении сигнала, поступающего с датчика давления, частотник снижает производительность насосной установки. При снижении оборотов вращения двигателя уменьшается потребление выходного напряжения. Так, стандартное потребление воды насосом требует 50Гц промышленной частоты и 400В напряжения. Руководствуясь формулой мощности можно высчитать соотношение потребляемых мощностей.
Уменьшая частоту до 40Гц, уменьшается величина напряжения до 250В, означает, что уменьшается количество оборотов вращения насоса и потребление энергии снижается в 2,56 раз.
Рис. №6. Использование частотного преобразователя Speedrive для регулирования насосных агрегатов по систем CKEA MULTI 35.
Для повышения энергетической эффективности использования частотного преобразователя в управлении электродвигателем необходимо сделать следующее:
- Частотный преобразователь должен соответствовать параметрам электродвигателя.
- Частотник подбирается в соответствии с типом рабочего оборудования, для которого он предназначен. Так, частотник для насосов функционирует в соответствии с заложенными в программу параметрами для управления работой насоса.
- Точные настройки параметров управления в ручном и автоматическом режиме.
- Частотный преобразователь разрешает использовать режим энергосбережения.
- Режим векторного регулирования позволяет произвести автоматическую настройку управления двигателем.
Выбор частотного преобразователя
При проектировании частотно-регулируемого электропривода необходимо учесть множество нюансов. При выборе частотника руководствуются следующими критериями:
- Назначение преобразователя. Многие производители выпускают ПЧ, предназначенные для электродвигателей насосов, лифтов, электроприводов вентиляционных систем, а также универсальные устройства общепромышленного назначения. Специализированные частотники производят под конкретное технологическое оборудование. Возможность их адаптации существенно ограничена. Общепромышленные регуляторы частоты можно настраивать под различные приводы.
- Способ управления и поддержка различных протоколов связи. Регулируемые по частоте электроприводы обычно интегрируются в комплексные системы автоматизации и удаленного контроля и управления. Частотный преобразователь должен быть укомплектован контроллером, который поддерживает связь по протоколу, применяемому в конкретной АСУТП.
- Мощность и перезагрузочная способность. Номинальная электрическая мощность преобразователя должна быть больше аналогичного параметра электродвигателя на 15-30%. При расчете мощности учитывают пусковые токи электрической машины, пиковые нагрузки на двигатель и их длительность. Ошибки ведут к перегреву частотника, выходу из строя силовых транзисторов или тиристоров.
- Диапазон и точность регулирования. Интервал изменения частоты и точность ее задания должны соответствовать требованиям условий технологического процесса. Возможность изменения частоты у скалярных преобразователей 1:10, если требуется более широкий диапазон, необходим частотник с векторным управлением.
- Электромагнитная совместимость. Частотный преобразователь чувствителен к электромагнитным помехам и сам является их источником. Выбор устройства осуществляется на основании условий его установки. При необходимости может потребоваться его установка в отдельном помещении, подключение специальных фильтров и использование экранированных кабелей. выпускает преобразователи, укомплектованные встроенными ЭМ-фильтрами.
- Наличие функций отключения двигателя при перегреве, дисбалансе фаз, перегрузках, других аварийных и ненормальных режимов работы.
- Наличие автоматизированного управления по событиям. Для синхронизации работы промышленного оборудования необходимы частотники, имеющие функции регулирования по достижению определенной величины технологических параметров.
- Количество входов и выходов для подключения удаленных устройств управления и контроля. На случай модернизации САР или усложнения АСТП рекомендуется выбрать частотники с избыточным количеством аналоговых и дискретных разъемов. Для электроприводов автоматизированных систем рекомендуется подобрать частотный регулятор со встроенной памятью и функцией ведения журнала событий.
- Номинальный ток и напряжение. Электрические параметры частотника должны соответствовать характеристикам электродвигателя.
Выбор частотного регулятора для промышленного оборудования делается на основании расчетов по специализированным методикам. Малейшие ошибки могут привести к авариям, которые могут иметь непредсказуемые последствия. Проектирование электропривода и выбор ПЧ целесообразно доверить специалистам по автоматизации. Правильный выбор частотника обеспечивает экономию электроэнергии до 40-50%, снижение затрат на ремонт и обслуживание электропривода и дает неплохой экономический эффект.
Технические особенности применения частотного электропривода
- Для обеспечения высокой производительности можно свободно переключаться на любой режим в настройках.
- Практически все устройства обладают диагностическими функциями, что позволяет быстро устранить возникшую неполадку. Однако рекомендуется в первую очередь проверить настройки, исключить вероятность непроизвольных действий работников.
- Регулируемыйприводможетсинхронизировать конвейерные процессы, либо задавать определённое соотношение взаимозависимых величин. Сокращение оборудования ведёт к оптимизации технологии.
- В состоянии автонастройки параметры двигателя автоматически заносятся в память преобразователя частоты. Благодаря чему повышается точность вычисления момента, и улучшается компенсация скольжения.
Область применения
Производителями предлагается широкий ассортимент приводов, используемых в областях, где задействованы электродвигатели. Идеальное решение для всех видов нагрузки, в том числе насосов и вентиляторов. Системы среднего класса используются на угольных электростанциях, в горнодобывающей промышленности, на мельницах, в жилищно-коммунальном хозяйстве и т. д. Диапазон номиналов выглядит таким образом: 3 кВ, 3.3 кВ, 4.16 кВ, 6 кВ, 6.6 кВ, 10 кВ и 11 кВ.
С появлением регулируемого электропривода контроль давления воды у конечного потребителя не вызывает проблем. Интерфейс с продуманной структурой сценариев отлично подходит для управления насосным оборудованием. Благодаря компактной конструкции, привод может быть установлен в шкаф различного исполнения. Продукты нового поколения обладают свойствами передовой техники:
- высокая скорость и точность управления в векторном режиме;
- существенная экономия электроэнергии;
- быстрые динамические характеристики;
- большой низкочастотный вращающий момент;
- двойное торможение и т. д.
Назначение и технические показатели
Комплектные ЧРП напряжением до и выше 1 кВ (предназначенные для приема и преобразования энергии, защиты электрооборудования от токов КЗ, перегрузки) позволяют:
- плавно запускать двигатель, а, следовательно, уменьшать его износ;
- останавливать, поддерживать частоту вращения вала двигателя.
Комплектные ЧРП шкафного исполнения до 1кВ выполняют те же задачи по отношению к двигателям с мощностью 0,55 – 800 кВт. Привод нормально работает, когда напряжение в электросети находится в пределах от -15% до +10%. При безостановочной работе снижение мощности наступает, если напряжение составляет 85%-65%. Общий коэффициент мощности cosj = 0,99. Выходное напряжение автоматически регулируется посредством автоматического включение резерва (АВР).
Преимущества использования
С точки зрения оптимизации и потенциальные преимущества предоставляют возможность:
- регулировать процесс с высокой точностью;
- удалённо диагностировать привод;
- учитывать моточасы;
- следить за неисправностью и старением механизмов;
- повышать ресурс машин;
- значительно снижать акустический шум электродвигателя.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки
В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Сложности при ШИМ регулировании скорости двигателя постоянного тока
ШИМ является популярным методом регулирования аналоговым напряжением в различных схемах. При использовании этого способа регулирования пользователь может столкнуться с непредсказуемым поведением двигателя. Например, вал может начать вращение в обратную сторону. Это происходит при низких емкостных нагрузках. В коллекторных двигателях в процессе работы происходит постоянное переключение обмоток якоря. Когда подключают регулятор, начинает происходить отключение и включение питание с определенной частотой. Дополнительная коммутация в сочетании с коллекторной может привести к проблемам с эксплуатацией двигателя. Поэтому устройства управления с ШИМ регулированием двигателя должны быть тщательно продуманы и проработаны.
Также причиной нестабильной работы электродвигателя может стать факт влияния силы тока на скорость вращения ротора, которая находится в зависимости от уровня приложенного напряжения. Проблемы могут возникнуть при эксплуатации двигателей на малой скорости по отношению к номинальному значению.
Например, у пользователя есть двигатель, который при номинальном напряжение вращает ротор со скоростью 10об/сек. Чтобы понизить скорость до 1 об/сек недостаточно просто снизить напряжение до 1В. Подобрать подходящее значение подаваемого напряжения сложно и если пользователю и удастся, то при незначительном изменении условий эксплуатации скорость снова изменится.
Решением проблемы является применение системы автоматического регулирования или кратковременное включение электродвигателя на полную мощность. Движение ротора будет происходить рывками, но при правильно подобранной частоте и длительности подаваемых импульсов можно сделать вращение более стабильным. Так, добиваются устойчивого движения вала электродвигателя с любой скоростью, которая не будет меняться в зависимости от нагрузки.
Преобразователь частоты однофазный
Компактное устройство преобразования частоты служит для управления однофазными электродвигателями для оборудования бытового предназначения. Большинство частотных преобразователей обладает следующими конструктивными возможностями:
- Большинство моделей использует в своей конструкции новейшие технологии векторного управления.
- Они обеспечивают улучшенный вращающий момент однофазного двигателя.
- Энергосбережение введено в автоматический режим.
- Некоторые модели частотных преобразователей используют съемный пульт управления.
- Встроенный PLC контроллер (он незаменим для создания устройств сбора и передачи данных, для создания систем телеметрии, объединяет устройства с различными протоколами и интерфейсами связи в общую сеть).
- Встроенный ПИД регулятор (контролирует и регулирует температуру, давление и технологические процессы).
- Напряжение выхода регулируется в автоматическом режиме.
Рис.№7. Современный преобразователь Optidrive с основными функциональными особенностями.
Частотный преобразователь не служит для двойного преобразования напряжения, благодаря наличию в конструкции ШИМ-регулятора, он может поднять величину напряжения не более чем на 10%.
Главная задача однофазного преобразователя частоты – обеспечить питание как одно- так и трехфазного электродвигателя. В этом случае ток двигателя будет соответствовать параметрам подключения от трехфазной сети, и оставаться постоянным
Советуем изучить — Устройство и схема плавного пуска асинхронного электродвигателя
Принцип работы однофазной асинхронной машины
При однофазном питании асинхронника в нем вместо вращающегося магнитного поля возникает пульсирующее, которое можно разложить на два магнитных поля, которые будут вращаться в разные стороны с одинаковой частотой и амплитудой. При остановленном роторе электродвигателя данные поля создадут моменты одинаковой величины, но различного знака. В итоге результирующий пусковой момент будет равен нулю, что не позволит двигателю запустится. По своим свойствам однофазный электродвигатель похож на трехфазный, который работает при сильном искажении симметрии напряжений:
на рисунке а) показана схема асинхронной однофазной машины, а на б) векторная диаграмма
Структура частотного регулятора
В настоящее время детально разработаны и широко применяются две основные топологии многоуровневых частотных преобразователей. Это каскадные и преобразователи на базе многоуровневых частотных инверторов напряжения.
Рис. №3 Структурная схема частотного преобразователя многоуровневого типа высокого напряжения, построенная на базе IGBT-транзисторов с воздушным или водяным охлаждением.
В состав устройства включен многообмоточный трансформатор. К особенностям схемы относится наличие силовых ячеек с последовательным соединением, благодаря чему на выходе устройства получается суммарное высокое напряжение. Подобная схема служит для получения формы выходного напряжения практически приближенной к идеальному синусу. Наличие шунтируемых в момент неисправности ячеек обуславливает высокую надежность схемы.
Как продолжение предыдущей схемы рассмотрим схему преобразователя на базе трансформаторного многоуровневого инвертора напряжения с широтно-импульсной модуляцией с применением IGBT-модулей. Для устройства характерна фиксированная частота ШИМ – 3кГц. В структуру устройства включены система защиты с использованием микропроцессора.
Рис. 4 Структурная схема преобразователя.
На схеме видно, что все блоки функционально взаимосвязаны. На схеме показано как работает частотный регулятор для асинхронного двигателя, устройство и принцип работы.
В первом блоке находится входной трансформатор, в блоке осуществляется передача электроэнергии от трехфазного высоковольтного источника питания. От многоуровневого трансформатора производится распределение пониженного напряжения в шкаф инвертора на многоуровневый инвертор.
Шкаф инвертора включает в состав многоуровневый трехфазный инвертор, состоящий из ячеек – преобразователей. В каждой находится шестиимпульсный фильтр для выпрямления звена постоянного тока и мостовой инвертор напряжения на IGBT-транзисторах. По схеме происходит выпрямление входного переменного тока, который благодаря инвертору изменяется в переменный ток, обладающий регулируемыми показателями частоты и напряжения.
В шкафу защиты управления находятся микропроцессорный блок, обладающий многофункциональными возможностями и системой питания от ТСН преобразователя, устройство ввода преобразователя и первичные сенсоры, обозначающие режимы работы преобразователя.
Микропроцессор служит для формирования сигналов управления инвертором в зависимости от обозначенного алгоритма работы. Он служит для обработки сведений, собранных с датчиков напряжения и тока. Микропроцессор формирует сигналы для управления защитами и аварийными кнопками управления, корректирует алгоритм управления.
Для передачи сведений и связи используется оптоволоконный кабель. Для бесперебойной работы имеется независимый встроенный источник питания. Редактирование параметров выполняется пультом дистанционного управления.
Для надежного отключения и безопасного проведения различного рода работ преобразователь оборудован линейным разъединителем.
Рис. №5 Обобщенная схема ячейки преобразователя
Источники управляемого переменного напряжения формируют фазу напряжения для выполнения их последовательного соединения. Выходная схема питающей сети асинхронного двигателя происходит по схеме соединения обмоток «Звезда». Напряжение в трехфазном инверторе распределяется по схеме.
Рис. №6 Схема распределения напряжения в инверторе на три фазы.
Регулирование напряжением
Регулирование скорости способом этим связано с изменением, так называемого, двигателя скольжения — разностью между скоростью вращения поля магнитного, создаваемого неподвижным статором двигателя и движущимся его ротором:
S=(n1-n2)/n2
n1 — скорость вращения магнитного скорость
n2 — поля вращения ротора
При этом выделяется обязательно энергия скольжения — из-за чего сильнее обмотки нагреваются двигателя.
Данный способ имеет диапазон небольшой регулирования, примерно 2:1, а также может только осуществляться вниз — то есть, снижением питающего При.
напряжения регулировании скорости таким способом устанавливать необходимо двигатели завышенной мощности.
Но несмотря на этот, это способ используется довольно часто двигателей для небольшой мощности с вентиляторной нагрузкой.
На для практике этого применяют различные схемы Автотрансформаторное.
регуляторов регулирование напряжения
Автотрансформатор — это трансформатор обычный, но с одной обмоткой и с отводами от части При. витков этом нет гальванической развязки от она, но сети в данном случае и не нужна, поэтому экономия получается из-за отсутствия вторичной обмотки.
На схеме автотрансформатор изображён T1, переключатель SW1, на который приходят разным с отводы напряжением, и двигатель М1.
Регулировка получается обычно, ступенчатой используют не более 5 ступеней регулирования.
данной Преимущества схемы:
- неискажённая форма выходного чистая (напряжения синусоида)
- хорошая перегрузочная способность Недостатки
трансформатора:
- большая масса и габариты трансформатора (мощности от зависят нагрузочного мотора)
- все недостатки регулировке присущие напряжением
Тиристорный регулятор оборотов данной
В двигателя схеме используются ключи — два включённых, тиристора встречно-параллельно (напряжение переменное, каждый поэтому тиристор пропускает свою полуволну или) напряжения симистор.
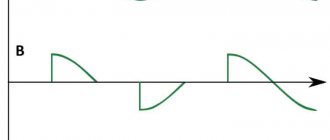
Схема управления регулирует открытия момент и закрытия тиристоров относительно фазового через перехода ноль, соответственно «отрезается» кусок или вначале, реже в конце волны напряжения.
образом Таким изменяется среднеквадратичное значение напряжения.
схема Данная довольно широко используется для активной регулирования нагрузки — ламп накаливания и всевозможных приборов нагревательных (так называемые диммеры).
Ещё способ один регулирования — пропуск полупериодов волны при, но напряжения частоте в сети 50 Гц для двигателя будет это заметно — шумы и рывки при Для.
работе управления двигателями регуляторы модифицируют из-за индуктивной особенностей нагрузки:
- устанавливают защитные LRC-для цепи защиты силового ключа (конденсаторы, дроссели, резисторы)
- добавляют на выходе конденсатор для формы корректировки волны напряжения
- ограничивают минимальную регулирования мощность напряжения — для гарантированного старта используют
- двигателя тиристоры с током в несколько раз ток превышающим электромотора
Достоинства тиристорных регуляторов:
- стоимость низкая
- малая масса и размеры
Недостатки:
- использовать можно для двигателей небольшой мощности
- работе при возможен шум, треск, рывки при
- двигателя использовании симисторов на двигатель попадает напряжение постоянное
- все недостатки регулирования напряжением
отметить Стоит, что в большинстве современных кондиционеров высшего и среднего уровня скорость вентилятора регулируется таким именно способом.