Назначение
Индуктивный датчик предназначен для контроля перемещения рабочего органа без непосредственного контакта с ним. Основной сферой применения для него является станочное оборудование, точные медицинские приборы, системы автоматизации технологических процессов, измерения и контроля формы изделия. В соответствии с положениями п.2.1.1.1 ГОСТ Р 50030.5.2-99 это датчик, который создает электромагнитное поле в области чувствительности и обладает полупроводниковым коммутатором.
Сфера применения индуктивных датчиков во многом определяется их высокой надежностью и устойчивостью к воздействию внешних факторов. На их показания и работу не влияют многие факторы окружающей среды: влага, оседание конденсата, скопление пыли и грязи, попадание твердых частиц. Такие особенности обеспечиваются их устройством и конструктивными данными.
Емкостные датчики приближения
Емкостные датчики приближения могут обнаруживать металлические и неметаллические объекты, а также аморфные продукты, такие как порошки, гранулы и жидкости. Хорошим примером такого устройства является CD50CNF06NO от Carlo Gavazzi. Он работает аналогично индуктивным датчикам, за исключением того что катушки индуктивного датчика были заменены емкостной детекторной пластиной. Чаще всего его используют для определения уровня жидкости в резервуарах. Металлическая пластина детектора в этом случае образует конденсатор с обнаруженным объектом, емкость которого изменяется с удалением от объекта. Он определяет частоту генератора, которая контролируется для переключения состояния выхода каждый раз, когда превышается порог.
Датчик CD50CNF06NO предназначен для контроля уровня жидкости. Он соединен тремя проводами и имеет выход с NPN-транзистором с открытым коллектором (NO). Требуется источник питания постоянного тока от 10 до 30 В. Он доступен в корпусе размером 50 х 30 х 7 мм и обеспечивает дальность обнаружения до 6 мм. В типовом случае он привинчивается или приклеивается к внешней стороне неметаллического резервуара.
Устройство
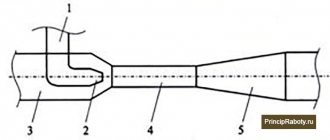
Развитие сегмента радиоэлектроники привело не только к совершенствованию первоначальных механизмов, но и к возникновению принципиально новых индуктивных датчиков. В качестве примера рассмотрим один из простейших вариантов (рисунок 1):
Рис. 1. Устройство индуктивного датчика
Как видите на рисунке, в его состав входят:
- магнитопровод или ярмо (1) – предназначен для передачи электромагнитного поля от генератора в зону чувствительности;
- катушка индуктивности (2) – создает переменное электромагнитное поле при протекании электрического тока по виткам;
- объект измерения (3) – металлический якорь, вводимый или перемещаемый в области чувствительности, неметаллические предметы не способные влиять на состояние электромагнитного поля, поэтому они не используются в качестве детектора;
- зазор между объектом измерения и основным магнитопроводом (4) – обеспечивает меру взаимодействия в качестве магнитного диэлектрика, в зависимости от модели датчика и способа перемещения может оставаться неизменным или колебаться в заданном диапазоне;
- генератор (5) — предназначен для генерации электрического напряжения заданной частоты, которое будет создавать переменное магнитное поле в заданной области.
Сферы использования
Возможная область применения индукционных датчиков настолько велика, что позволяет использовать их не только в быту и автомобилестроении, но и в промышленности с робототехникой, а также медицине.
Медицинские аппараты
Индуктивные датчики широко используются при производстве медицинского оборудования, поскольку магнитные свойства устройства позволяют регистрировать легочную вентиляцию, параметры вибрации, а также снимать баллистокардиограммы.
Бытовая техника
В бытовом плане датчики могут выступать в качестве приспособления контроля водоснабжения, уровня освещения и положения двери (закрыта или открыта), поэтому используются при производстве, к примеру, стиральных машин и другой бытовой техники. Кроме того, устройства применяются в процессе создания элементов «умного дома».
Автомобильная промышленность
Используется индукционный датчик и в автостроении, выступая в роли контроллера, определяющего положение коленчатого вала. При приближении металлического объекта, в данном случае, зуба шестерни, к устройству, генерируемое встроенным постоянным магнитом магнитное поле увеличивается, что приводит к наведению в катушке переменного напряжения.
Внимание! Некоторые производители для повышения эффективности стараются изменить конструкцию индукционного датчика, к примеру, используя внешние магниты для его активации.
Робототехническое оборудование
В случае с робототехникой, индуктивным датчикам нашли применение в производстве беспилотных аппаратов и промышленных роботов для повышения их чувствительности к препятствиям и способности распознавать объекты, а также устройствах, для которых важна самобалансировка.
Промышленная техника регулирования и измерения
Широко используются в работе систем транспортеров, упаковочных аппаратов и сборочных линий, а еще в составе всех видов станкового оборудования и запорной арматуры. Также индуктивные датчики помогают контролировать мелкие и крупные элементы промышленной техники (зубцы шестеренок, стальные флажки, штампы), объекты производства (металлические изделия, листы металла, крышки) и т.п. Кроме того, при их подключении к импульсным счетчикам можно в результате получить элементарное, но крайне эффективное считывающее устройство.
Принцип работы
Принцип действия индуктивного датчика заключается в способности электромагнитного поля изменять свои параметры, в зависимости от значения магнитной проводимости на пути протекания потока. В основе его работы лежит классический вариант катушки, намотанной на сердечник.
Рис. 2. Магнитное поле в состоянии покоя
При протекании электрического тока I по виткам этой катушки генерируется магнитное поле (см. рисунок 2), результирующий вектор магнитной индукции B которого определяется по правилу Правой руки. При движении магнитного поля по сердечнику, ферромагнитный материал обеспечивает максимальную пропускную способность. Но, как только линии магнитной индукции попадают в воздушное пространство, магнитная проводимость существенно ухудшается и часть поля рассеивается.
Рис. 3. Магнитное поле при введении объекта срабатывания
При внесении в область действия поля индуктивного датчика объекта срабатывания (рисунок 3), изготовленного из металла, напряженность линий индукции резко изменяется. В результате чего усиливается поток и меняется его значение, а это, в свою очередь, приводит к изменению электрической величины в цепи катушки за счет явления взаимоиндукции. На практике этот сигнал слишком мал, поэтому для расширения предела измерения индуктивного датчика в их схему включается усилитель.
Индукционные датчики следующего поколения
Благодаря новым разработкам в этой области, были созданы усовершенствованные модели индукционных датчиков следующего поколения. Принцип работы остался прежним, однако подверглась тщательной переработке конструкция устройства. В результате датчики теперь оснащаются тонкими платами, распечатанными на 3D-принтерах, и современной цифровой электроникой. Кроме того, их производят на гибких подложках, что избавляет от необходимости использования традиционных кабелей и разъемов. Так что пользоваться устройствами можно даже в тяжелых погодных условиях.
К преимуществам новых разработок можно отнести следующее:
- снижение стоимости и веса, более компактные размеры;
- возможность выбора практически любых форм-факторов;
- повышение точности реагирования на металлические объекты;
- возможность проведения замеров, связанных со сложной геометрией, в двух или трех измерениях;
- упрощение конструкции;
- возможность устанавливать несколько индукционных датчиков близко друг к другу из-за высокой электромагнитной совместимости.
Расстояние срабатывания и объект воздействия
В зависимости от конструкции и принципа действия индуктивного датчика объект воздействия может иметь вертикальное или горизонтальное перемещение относительно самого измерителя. Однако реакция сенсора на начало движения контролируемого объекта может начинаться не сразу, что обуславливается номинальным расстоянием, при котором обеспечивается зона чувствительности датчика и техническими параметрами объекта.
Рис. 4. Область и объект срабатывания
Как видите на рисунке 4, в первом положении контролируемый объект находится на таком удалении, где электромагнитные линии не достигают его поверхности. В таком случае с индуктивного датчика сигнал сниматься не будет, так как он не фиксирует перемещения в зоне чувствительности. Во втором положении контролируемый объект уже пересек расстояние срабатывания и вошел в чувствительную зону. В результате взаимодействия с объектом на выходе датчика появится соответствующий сигнал.
Также расстояние срабатывания будет зависеть от геометрических размеров, формы и материала. Следует заметить, что в качестве объекта срабатывания индуктивного датчика применяются только металлические предметы, но от конкретного типа будет отличаться и момент перехода датчика в противоположное состояние, что изображено на диаграмме:
Рис. 5. Зависимость расстояния срабатывания от материала
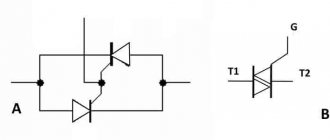
Транзисторные пары в схемах управления электродвигателями
Их применяют также в H-мостовых цепях управления реверсивными двигателями постоянного тока, позволяющих регулировать ток через двигатель равномерно в обоих направлениях его вращения.
H-мостовая цепь выше называется так потому, что базовая конфигурация ее четырех переключателей на транзисторах напоминает букву «H» с двигателем, расположенным на поперечной линии. Транзисторный H-мост, вероятно, является одним из наиболее часто используемых типов схемы управления реверсивным двигателем постоянного тока. Он использует «взаимодополняющие» пары транзисторов NPN- и PNP-типов в каждой ветви, работающих в качестве ключей при управлении двигателем.
Вход управления A обеспечивает работу мотора в одном направлении, в то время как вход B используется для обратного вращения.
Например, когда транзистор TR1 включен, а TR2 выключен, вход A подключен к напряжению питания (+ Vcc), и если транзистор TR3 выключен, а TR4 включен, то вход B подключен к 0 вольт (GND). Поэтому двигатель будет вращаться в одном направлении, соответствующем положительному потенциалу входа A и отрицательному входа B.
Если состояния ключей изменить так, чтобы TR1 был выключен, TR2 включен, TR3 включен, а TR4 выключен, ток двигателя будет протекать в противоположном направлении, что повлечет его реверсирование.
Используя противоположные уровни логической «1» или «0» на входах A и B, можно управлять направлением вращения мотора.
Виды
На практике существует огромное разнообразие индуктивных датчиков, всех их можно разделить на две большие категории, в зависимости от рода питающего тока – переменного и постоянного. В зависимости от состояния контактов в соответствии с таблицей 1 р.3 ГОСТ Р 50030.5.2-99 индуктивные датчики бывают:
- замыкающий – при перемещении контролируемого объекта происходит перевод во включенное положение;
- размыкающий – в случае воздействия индуктивный датчик переводит контакты в отключенное положение;
- переключающий – одновременно объединяет оба предыдущих варианта, за одну коммутацию переводит один вывод во включенное, второй, в отключенное положение.
По количеству измерительных цепей индуктивные датчики подразделяются на одинарные и дифференциальные. Первый из них обладает одной катушкой и одной цепью измерения. Второй тип подразумевает наличие двух сенсоров, измерительные цепи которых включаются в противофазу для сравнения показаний.
Рис. 6. Одинарый и дифференциальный датчик
По способу передачи данных индуктивные датчики подразделяются на аналоговые, электронные и цифровые. В первом случае применяются те же катушки и ферромагнитные сердечники. Электронные используют триггер Шмидта вместо ферромагнетиков для получения гистерезисной составляющей. Цифровые выполняются в формате печатных плат на микросхемах. Помимо этого виды подразделяются по количеству выводов датчика: два, три, четыре или пять.
Ультразвуковые датчики приближения
Когда требуются большие расстояния, например обнаружение автомобиля перед воротами гаража, подойдут ультразвуковые датчики. Они обнаруживают всевозможные объекты на расстоянии до нескольких метров. Основой измерения является время пролета ультразвукового импульса, испускаемого передатчиком, который отражается от целевого объекта и принимается приемником.
Зная скорость распространения ультразвука расстояние можно рассчитать. В представленном примере время прохождения сигнала составляет 3 мс. Для воздуха при 21 C скорость звука составляет 343 м / с, поэтому общее расстояние до объекта составляет 60 см.
MatBotix MB1634-000 — ультразвуковой датчик приближения с дальностью до 5 м, питаемый напряжением от 2,5 до 5,5 В. Он обеспечивает на выходе аналоговый сигнал, сигнал ШИМ или может передавать цифровые данные последовательно с уровнями напряжения TTL. Имеет автокомпенсацию изменения размеров объекта и встроенный стабилизатор. Доступна дополнительная внешняя температурная компенсация.
Характеристики (параметры)
При выборе индуктивного датчика для решения конкретной задачи руководствуются параметрами цепи, в которых он будет функционировать и основной логикой схемы. Поэтому обязательно проверяется соответствие их параметров:
- напряжение питания – определяет допустимый минимум и максимум разности потенциалов, при которой индуктивный датчик нормально работает;
- минимальный ток срабатывания – наименьшее значение нагрузки, при котором произойдет переключение;
- расстояние срабатывания – допустимый промежуток удаления, при котором будет происходить коммутация;
- индуктивное и магнитное сопротивление – определяет проводимость электрического тока и линий магнитной индукции для конкретной модели;
- поправочный коэффициент – применяется для внесения поправки, в зависимости от дополнительных факторов;
- частота переключений – максимально возможное количество раз коммутации в течении секунды;
- габаритные размеры и способ установки.
Мониторинг паропроводов
LOCA (утечка охладителя) описавает аварию с утечкой охлаждающей жидкости в реакторе, причина которой может заключаться в нарушении трубопроводной системы. В худшем случае, можно предположить, что оба конца трубы отрезаны и утечка происходит через двойное сечение трубопровода. Соответственно рассичтывается аварийная охлаждающая система и размер резервной емкости реактора. Дублирующие системы должны быть доступны, поврежденные трубопроводы должны быть перекрыты аварийными клапанами за короткий промежуток времени. Причины аварии могут быть разными, например, землетрясение, крушение самолета или цунами.
Другое возможное явление — это гидроудар, который может произойти в горячих паропроводах при конденсации части насыщенного пара и накопления в трубе из-за недостаточного дренирования, так что неожиданно на определенных участках трубы все поперечное сечение оказывается заполнено водой. Водяной столб ускоряется давлением пара, и происходит удар, похожий на работу поршня цилиндра. Последующие изгибы трубопровода представляют препятствие водяному столбу и его массовой инерции. Давление в сети трубопроводов быстро возрастает и в несколько раз превышает максимальное давление пара и может исчерпать запас проектный прочности трубопровода, приводя к деформации или разрыву трубы.
Мониторинг трубопроводов электростанций
В обоих авариях, LOCA (утечка охладителя) и гидроудар, важно постоянно контролировать важные для безопасности станции элементы, такие как трубопроводы охлаждения и паропроводы перегретого пара, а также, если необходимо, немедленно их перекрывать при помощи аварийных клапанов. Функции берут на себя дублирующие системы. Эффективное предохранительное устройство состоит из установленных датчиков перемещений трубопроводов, построенных по принципу полного индуктивного моста (LVDT). Индуктивный датчик перемещений передает данные о положении трубопровода в виде сигнала на пульт управления. Кроме того, низкочастотные вибрации трубопроводов могут служить сигналом о возможной аварии. Положение трубопроводов в нескольких различных точках отображается на пульте управления станции. Если результат измерений выходит за предварительно заданные пороговые значения с учетом возможных расчетных перемещений и амплитуды вибраций, подается сигнал тревоги и выполняется установленная аварийная процедура.
Установка индуктивного датчика линейных перемещений для мониторинга паропроводов (измерение положения трубы)
Используются диапазоны измерений индуктивных датчиков линейных перемещений от 100 до 300 мм. Сами датчики должны выдерживать экстремальные условия эксплуатации без ущерба, например, максимальную температуру 180°C, паро-воздушную смесь 100% (относительная влажность) и конденсат 0,5 кг/м³ при температуре 125°C. Датчики eddylab, предназначенные для этой задачи, состоят из цилиндрического корпуса и подвижного штока. Корпус крепится к неподвижной конструкции при помощи струбцин, шток соединяется с трубопроводом. Если паропровод движется вместе со штоком относительно корпуса датчика, выходной сигнал изменяется. Результаты мониторинга в виде непрерывного сигнала положения передаются в систему управления станции.
Внутри датчик состоит из системы катушек (первичная и вторичная) в герметичном корпусе с кольцевыми уплотнениями Viton. Электроника IMCA питает первичную катушку LVDT сигналом на несущей частоте 3 кГц и анализирует дифференциальное напряжение на вторичной катушке по амплитуде и фазе. Преимуществом данной системы является возможность использования длинного кабеля между датчиком и электроникой, так что электроника может находиться в безопасном месте на удалении 100 м и более, в то время как датчик может подвергаться экстремальным условиям на месте установки без проблем.
Двухпроводных датчиков индуктивности
Рис. 7. Схема подключения двухпроводного датчика
Как видите на схеме выше, двухпроводные индуктивные датчики применяются исключительно для непосредственной коммутации нагрузки: контакторов, пускателей, катушек реле в качестве электронного выключателя. Это наиболее простая схема и модель, но работа конкретной модели сильно зависит от параметров подключаемой нагрузки.
Область применения индуктивных датчиков
Индуктивные бесконтактные датчики часто применяют в качестве концевых выключателей. Такие устройства получили распространение:
- в охранных системах, как датчики несанкционированного открытия окон и дверей;
- в системах телемеханики, как датчики конечного положения узлов и механизмов;
- в быту в схемах индикации закрытого положения дверей, створок;
- для подсчета предметов (например, движущихся по ленте транспортера);
- для определения частоты вращения зубчатых колес (каждый зубец, проходя мимо датчика, создает импульс);
- в прочих ситуациях.
Датчики углового положения могут применяться для определения углов поворота валов, шестерней и других вращающихся узлов, а также в качестве абсолютных энкодеров. Также такие устройства могут использоваться в станочном оборудовании и в робототехнических устройствах наряду с датчиками линейного положения. Там, где надо точно знать положение узлов механизмов.
Трехпроводных датчиков индуктивности
Рис. 8. Схема подключения трехпроводного датчика индуктивности
В трехпроводной схеме присутствует два вывода на питание самого индуктивного датчика, а третий, предназначен для подключения нагрузки к нему. По способу коммутации их подразделяют на PNP и NPN, первый вид коммутирует положительный вывод, откуда и происходит название, второй тип коммутирует отрицательный вывод.
Маркировка при подключении
На принципиальных схемах индуктивные датчики принято обозначать в виде ромба или квадрата с двумя вертикальными линиями внутри. Нередко в них также указывается тип выхода (нормально открытый или закрытый), соответствующий одной из разновидностей полупроводниковых транзисторов. В большинстве вариантов схем указывается нормально закрытая группа или оба типа в одном корпусе.
Цветовая маркировка выводов
Перед установкой датчика необходимо сверить данные с инструкцией
На практике применяется стандартная система маркировки выводов датчиков индуктивности, которой придерживаются все без исключения производители чувствительных приборов. Тем не менее, перед их монтажом рекомендуется внимательно следить за полярностью подключения и обязательно сверяться с прилагаемой к изделиям инструкцией.
На корпусах всех датчиков имеется рисунок с цветной маркировкой проводов, если это позволяют его размеры.
Стандартный порядок обозначения:
- синий (Blue) всегда означает минусовую шину питания;
- коричневым цветом (Brown) обозначается плюсовой проводник;
- черный (Black) соответствует выходу датчика;
- белый (White) – это дополнительный выход или вход.
Для уточнения последнего маркировочного обозначения его следует сверить с данными инструкции, прилагаемой к конкретному прибору.
Четырехпроводных датчиков индуктивности
Рис. 9. Схема подключения четырехпроводного датчика индуктивности
По аналогии с предыдущим датчиком, четырехпроводный также использует два вывода 1 и 3 для получения питания. А вот 2 и 4 вывод используется для подключения нагрузки с той разницей, что коммутация для обеих нагрузок будет противоположной.
Оптические датчики приближения
Оптические датчики приближения (по ссылке обзор и тестирование) используют инфракрасное или видимое излучение для обнаружения. У них есть то преимущество, что наблюдаемый объект не обязательно должен быть магнитным или металлическим — он просто должен скрывать или отражать свет. Большинство оптических датчиков излучают луч в направлении объекта и контролируют отраженный свет.
Датчик EE-SY1200 от Omron Electronics — хороший пример оптического датчика приближения. Это сверхкомпактное решение для монтажа на печатной плате, в котором используется инфракрасное (850 нм) излучение. Детектор состоит из светодиодного излучателя и пары фототранзисторов в SMD-корпусе размером всего 1,9 х 3,2 х 1,1 мм. Рекомендуемый диапазон обнаружения составляет 1-4 мм. Благодаря небольшим размерам он может быть встроен непосредственно в устройства без использования жгутов проводов и разъемов, например, с использованием гибких подложек.
Пятипроводных датчиков индуктивности
Рис. 10. Схема подключения пятипроводного датчика индуктивности
В пятипроводном индуктивном датчике два вывода применяются для подачи напряжения на чувствительный элемент датчика, в рассматриваемом примере это 1 и 3. Два вывода 2 и 4 подают питание на разные нагрузки, а управляющий вывод 5 позволяет выбирать различные режимы работы и менять логику переключений.
А что там свежего в группе ВК СамЭлектрик.ру?
Подписывайся, и читай статью дальше:
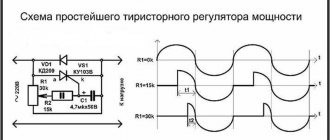
Итак, схема слева. Предположим, что тип датчика – НО. Тогда (независимо от типа транзистора на выходе), когда датчик не активен, его выходные “контакты” разомкнуты, и ток через них не протекает. Когда датчик активен, контакты замкнуты, со всеми вытекающими последствиями. Точнее, с протекающим током через эти контакты)). Протекающий ток создает падение напряжения на нагрузке.
Внутренняя нагрузка показана пунктиром неспроста. Этот резистор существует, но его наличие не гарантирует стабильную работу датчика, датчик должен быть подключен к входу контроллера или другой нагрузке. Сопротивление этого входа и является основной нагрузкой.
Так вот, в схеме с PNP выходом при активации напряжение (+V) через открытый транзистор поступает на вход контроллера, и он активизируется. Как того же добиться с выходом NPN?
Смотрим на изменения в схеме справа. Прежде всего, обеспечен режим работы выходного транзистора датчика. Для этого в схему добавлен дополнительный резистор, его сопротивление обычно порядка 5,1 – 10 кОм. Теперь, когда датчик не активен, через дополнительный резистор напряжение (+V) поступает на вход контроллера, и вход контроллера активизируется. Когда датчик активен – на входе контроллера дискретный “0”, поскольку вход контроллера шунтируется открытым NPN транзистором, и почти весь ток дополнительного резистора проходит через этот транзистор.
В данном случае происходит перефазировка работы датчика. Зато датчик работает в режиме, и контроллер получает информацию. В большинстве случаев этого достаточно. Например, в режиме подсчета импульсов – тахометр, или количество заготовок.
Да, не совсем то, что мы хотели, и схемы взаимозаменяемости npn и pnp датчиков не всегда приемлемы.
Как добиться полного функционала? Способ 1 – механически сдвинуть либо переделать металлическую пластинку (активатор). Либо световой промежуток, если речь идёт об оптическом датчике. Способ 2 – перепрограммировать вход контроллера чтобы дискретный “0” был активным состоянием контроллера, а “1” – пассивным. Если под рукой есть ноутбук, то второй способ и быстрее, и проще.
Преимущества и недостатки
В сравнении с другими типами сенсорных устройств индуктивные датчики продолжают занимать весомую нишу, наращивая темпы внедрения в различные сферы промышленности и отрасли народного хозяйства. Такое частое применение объясняется рядом весомых преимуществ:
- высокая надежность за счет простой конструкции и отсутствия подвижных контактов;
- может функционировать как от бытовой сети, так и от специальных генераторов, преобразователей и прочих источников питания;
- способны обеспечивать значительную мощность на выходе — порядка нескольких десятков Ватт;
- характеризуются высокой чувствительностью в зоне измерения.
Но, вместе с тем, существуют и недостатки индуктивных датчиков, которые не позволяют использовать их повсеместно. Среди наиболее существенных минусов являются громоздкие размеры, не позволяющие монтировать их в любых устройствах. Также к недостаткам относится зависимость параметров работы от температурных и других факторов, вносящих поправку на точность.
Погрешности
Погрешности в процессе преобразования диагностических значений оказывают влияние на способности индукционных датчиков выдавать достоверную информацию. К основным из них можно отнести следующие.
Электромагнитная
Данную погрешность принято учитывать только в качестве случайной величины. Как правило, она возникает в ходе индуцирования ЭДС в индукционной катушке в результате внешнего воздействия сторонними магнитными полями. Это происходит в процессе производства из-за силовых электроустройств. Они образуют магнитные поля, что впоследствии и формирует электромагнитную погрешность.
От температуры
Эта погрешность тоже выступает в качестве случайного значения, поскольку работа большого числа элементов индукционного датчика напрямую зависит от температурных показателей, поэтому это ключевая величина, которая даже учитывается в процессе проектировки подобного оборудования.
Магнитной упругости
Обычно такая погрешность может проявляться как следствие нестабильности деформации магнитопровода устройства в процессе сборки самого датчика, а также при деформационных изменениях во время работы. Кроме того, оказываемое нестабильным электронапряжением воздействие на магнитопровод оборудования вызывает снижение качества передаваемого сигнала на выходе.
Деформация элементов
Данная погрешность, как правило, проявляется в результате воздействия измеряющей силы на значение деформации частей индукционного датчика, а также под влиянием усилий, оказываемых на нестабильные деформирующие процессы. Кроме того, не меньшее влияние на нее могут оказывать люфты и зазоры, образовавшиеся в подвижных элементах конструкции устройства.
Кабеля
Такая погрешность обычно проявляется от непостоянного значения сопротивления, в случае деформации самого провода и под влиянием температуры. Также подобным образом может сказаться наводка внешними полями ЭДС в кабеле.
Старение
Данная погрешность может проявляться при износе движущихся элементов самого устройства, а также в случае постоянно изменяющихся магнитных свойств используемого магнитопровода. Ее принято считать, строго говоря, случайным значением. В процессе определения данной погрешности учитывают кинематику конструкции индукционного датчика, а во время проектирования подобного оборудования максимальный эксплуатационный срок рекомендуется определять только при работе в обычном режиме, чтобы при этом износ не успел превысить установленного значения.
Потенциометр
Потенциометр – переменный резистор. Потенциометр имеет прочную металлическую или пластиковую ручку, связанную с ползунком, которая позволяет отрегулировать сопровтивление, после чего происходит деление переменного напряжения. В условных знаках и обозначениях символом потенциометра является резистор с проходящей через него стрелкой.
Стрелка является третьим соединением и показывает, что потенциометр – это переменный резистор.
Потенциометры широко применяются в современных электронных устройствах. Когда речь идёт про автомобили, переменные резисторы можно найти в датчике положения дрюссельной заслонки и в датчике положения педали аксеператора.
Потенциометр включает электрические соединения, ось регулировки, дорожку переменного сопротивления, резистивную дорожку для переменного сопротивления подвижной контакт (скользящий элемент), ползунок, корпус, потенциометр имеет две круглые дорожки: внешнюю и внутреннюю.
Внешняя дорожка выполнена из углеводорода, поэтому на ней возникает сопротивление. Внутренняя дорожка выполнена из высокопроводящего материала.
В зависимости от характера измерения сопротивления выделяются линейные и логарифмические потенциометры. В логарифмических потенциометрах значения сопротивления увеличивается с помощью логарифмической функции. В начале движения ползунка сопротивление изменяется быстро, а затем замедляется.
А вы уже используете модули ELECTUDE для обучения и повышения квалификации автомобильных электриков и диагностов?
Бесконтактные датчики с выходом NAMUR
Значения напряжения и силы тока переключателей с выходом NAMUR настолько низкие, что они могут безопасно использоваться во взрывоопасных средах. Номер модели устройств этой линейки содержит букву «N» после идентификационного номера, иногда в сочетании с цифрой.
Ограничение мощности реализуется в соответствующем оборудовании. Это значит, что цепь с бесконтактным датчиком NAMUR будет искробезопасной, только если питание в нее поступает через соответствующий изолированный усилитель.